
Ключевые возможности SprutCAM Robot
SprutCAM Robot выходит за рамки традиционного ПО для программирования роботов.
Одно решение для автономного программирования, которое включает в себя:
- расчет траектории инструмента;
- моделирование.
- оптимизация движений
- Качественная поддержка различных CAD-форматов.
Траектории инструмента рассчитываются в собственных 6-осевых кодах, и никаких преобразований для перехода от 5 до 6 осей не требуется.
Для программирования промышленных роботов доступен специальный функционал: контроль столкновений, обход зоны сингулярности, контроль пределов рабочей зоны
В SprutCAM все перемещения рассчитываются с учетом кинематики конкретного робота.
Перемещения каждой из осей робота можно оптимизировать либо автоматически, либо вручную, чтобы расширить зону обработки, избежать столкновений или улучшить качество обработки
Поддерживаемые модели роботов
Библиотека кинематических схем SprutCAM Robot включает в себя широкий спектр роботов всех основных производителей:
- Fanuc
- KUKA
- Staubli
- Yaskawa Motoman
- Toshiba
- Mitsubishi
- Nachi
- ABB и прочие.
Кроме того, используя стандартные шаблоны, можно быстро создавать собственные кинематические модели роботизированных ячеек


Расчет траектории
Стратегии для фрезерования, резки, сварки, наплавки, полировки, покраски, обработки камня.
Стратегии черновой обработки:
параллельная, эквидистантная, высокоскоростная, адаптивная, черновая послойная, черновая ротационная, обработка отверстий и много других.
Стратегии чистовой обработки:
чистовая обработка, плоскость, гребешок (3D-переход с постоянным шагом), морфинг, ротационная обработка, 5D-наплавка.
Стратегии обработки по контуру:
2D, 3D, и 5D контур.
Специальные стратегии:
Черновая обработка камня, сварка, термообработка, фрезерование скульптур
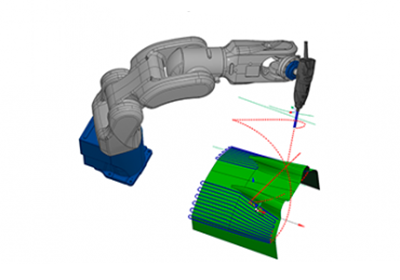
Оптимизация
Обход сингулярностей и столкновений, учет ограничений рабочей зоны с помощью специального мощного инструмента: карты осей робота.
Оси которыми можно управлять в карте:
A6 (6-я ось), рельс, поворотный позиционер, уголы наклона вдоль и перпендикулярно траектории.
Что показывает карта:
Выход за зону досягаемости, выход за пределы осей, точки синигулярности, столкновения. Так же карта показывает зоны ускоренных и рабочих перемещений.
Автоматизация:
Просто нажмите «Рассчитать автоматически». В большенстве случаев автоматический расчет составляет безопасную траекторию.
Точный контроль:
Редактируйте любую точку траектории инструмента с предварительным просмотром в реальном времени


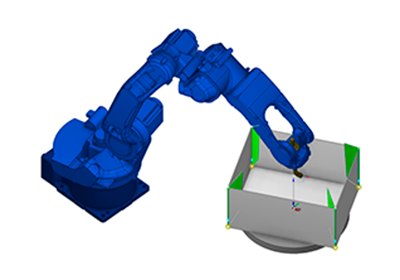
Моделирование
Полное моделирование роботизированной ячейки. Моделирование удаления материала.
Плавное моделирование в высоком разрешении.
Полное моделирование роботизированной ячейки:
Робот, позиционеры, столы, рельсы, исполнительные механизмы, ограждения, оснастка, инструментальный магазин и любая другая импортированная геометрия используется для моделирования. С сохранением кинематики.
Удаление материала, наплавка, покраска:
Специальные режимы моделирования для покраски, добавления и удаления материала
Моделирование
Плавное моделирование в высоком разрешении.
Полное моделирование роботизированной ячейки:
Робот, позиционеры, столы, рельсы, исполнительные механизмы, ограждения, оснастка, инструментальный магазин и любая другая импортированная геометрия используется для моделирования. С сохранением кинематики.
Удаление материала, наплавка, покраска:
Специальные режимы моделирования для покраски, добавления и удаления материала.


Верификация и запуск управляющих программ
Инструменты для постпроцессирования, калибровки и подготовки кинематических моделей роботизированных ячеек.
Воссоздайте точную кинематическую модель вашей роботизированной ячейки в SprutCAM Robot с помощью специального приложения – Machine Maker:
Простое приложение для быстрого создания роботизированных ячеек для работы в SprutCAM. Входит в SprutCAM.
Калибровка TCP и базы:
Мобильное приложение для быстрой и точной калибровки TCP по методу two spikes и передачи параметров в SprutCAM.
Постпроцессоры для роботов: Kuka, Fanuc, Motoman, ABB, Staubli, Nachi и прочих. Можно заказать тонкую настройку постпроцессора для вашего проекта.
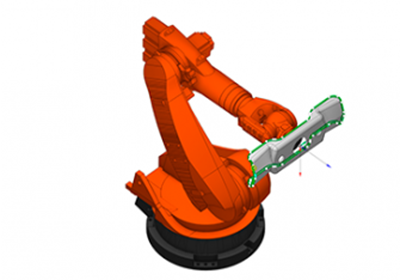
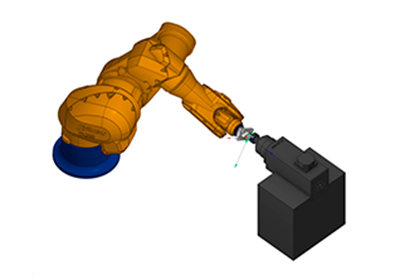
Позиционирование робота
Программирование робота в SprutCAM Robot выполняется с учетом положения робота в пространстве: крепление на полу / стене / полке / потолке Поддерживается работа, когда деталь закреплена на неподвижной оснастке и движется инструмент, так и когда деталь закреплена на роботе, а инструмент неподвижен


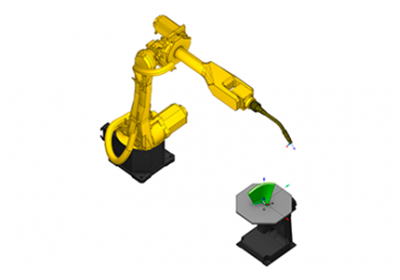
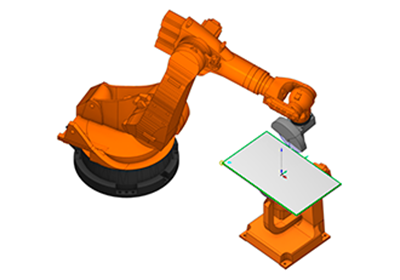
Поддержка дополнительных осей
SprutCAM Robot поддерживает симуляцию перемещений как самого робота, так и не ограниченное количество дополнительных линейных и поворотных осей позиционеров.
Пример:
Робот может перемещаться по рельсу и одновременно выполнять фрезерование, или ротационную обработку детали установленную на поворотном столе. Дополнительными осями роботизированной ячейки можно управлять автоматически с помощью набора правил, либо вручную с помощью специального инструмента: «оптимизатора осей робота»
ПРИМЕНЕНИЕ SprutCAM Robot
Резка
Все редакторы контента реализованы при помощи веб-браузера. Дополнительная установка ПО не требуется
Полировка
Поддерживается работа, когда деталь закреплена на неподвижной оснастке и движется инструмент, так и когда деталь закреплена на роботе, а инструмент неподвижен
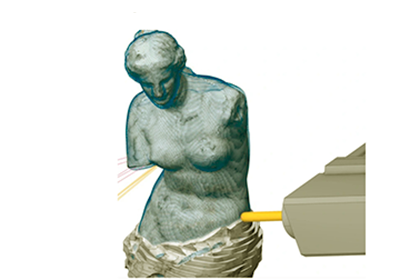
Обработка скульптур
Черновая обработка камня, дисковый инструмент, сложная 5D чистовая обработка сетчатых моделей (mesh)
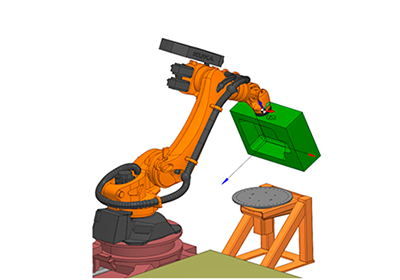
Pick-and-place
Pick-and-place автоматическим обходом столкновений
Дисковый инструмент
Черновая обработка камня, дисковый инструмент, сложная 5D чистовая обработка сетчатых моделей (mesh)
Резка горячей проволокой
Все редакторы контента реализованы при помощи веб-браузера. Дополнительная установка ПО не требуется
ПРЕИМУЩЕСТВА SprutCAM
1
Сократите время простоя
Оффлайн программирование повышает производительность, благодаря уменьшению времени простоя робота и снижению затрат на его программирование
2
Экономьте время
Это намного быстрее, чем программирование обучением т.к. не требуется никакого обучения по точкам
3
Поддерживает дополнительные оси
В SprutCAM очень просто программировать роботизированные ячейки с поворотными столами или роботами на рельсах
4
Доверьте компьютеру выполнить рутинную работу
Поиск перемещений без столкновений и автоматическая оптимизация траектории обработки
5
Реалистичное моделирование
Реалистичное моделирование обработки и верификация, а также постпроцессирование и вывод кода программы на родном языке робота
6
Не имеющий равных рабочий процесс
Расчет траектории, оптимизация траектории, симуляция обработки и постпроцессирование в единой среде программирования
